Patent & Intellectual Property
Robotic Assistant Station with Deterministic Docking and Coordinate-Normalized Interaction
Application Information
Robotic Assistant Station with Coordinate-Normalized Peripheral Abstraction,
Deterministic Docking, and Autonomous Instrument Handling
Application Type
Utility – Provisional
(35 U.S.C. §111(b))
Filing Date
February 9, 2026
Application No.
63/978,783
Confirmation No.
7232
Patent Center No.
74400413
Jurisdiction
USPTO
First Named Inventor
Mr. Michail Mandelel
Filing Confirmation
Application filed and registered via USPTO Patent Center system. Filing confirmed by official Submission Receipt.
Core Innovation
The invention relates to robotic systems for clinical, medical, and laboratory applications.
The key technological concept is the creation of a coordinate-normalized interaction layer for peripheral devices, enabling deterministic robotic operation without calibration, sensor binding, or digital equipment integration.
All external devices are mechanically brought into the robot's unified coordinate system — the environment adapts to the robot, not the other way around.
Scope of Technical Protection
Deterministic Mechanical Docking System
- ▸Docking stations with fixed geometry
- ▸Reproducible device positioning
- ▸Rigid binding to the robot coordinate system
Interchangeable Adapter System
- ▸Adapters for various device types
- ▸Mechanical position normalization
- ▸Elimination of installation variability
Coordinate-Normalized Interaction (core innovation)
- ▸Unified coordinate system
- ▸Pre-defined interaction points
- ▸No trajectory training, no recalibration, no computer vision required
Equipment-Integration-Free Operation
- ▸No API, no digital connection
- ▸No device-state dependency
- ▸Interaction exclusively through physical controls
Fully Automated Processing Cycle
- ▸Receive → store → transport → process via external devices → return / dispense
Physically Isolated Work Zone
- ▸Human-robot separation
- ▸High-speed operation capability
- ▸Enhanced safety and productivity
Usage Restrictions
Without consent of the rights holder, implementation of solutions is prohibited that include:
- ✗Mechanical standardization of device position for robotic interaction
- ✗Systems with pre-defined coordinates without calibration
- ✗Docking architectures with reproducible device positioning
- ✗Robotic systems eliminating the need for sensors, computer vision, or equipment integration
Scope of Legal Protection
where precision is achieved through geometry, not sensors
⚠️ Scope Limitations
The application does not directly cover systems that use computer vision, require dynamic calibration, are based on sensor adaptation, or are fully integrated via digital interfaces.
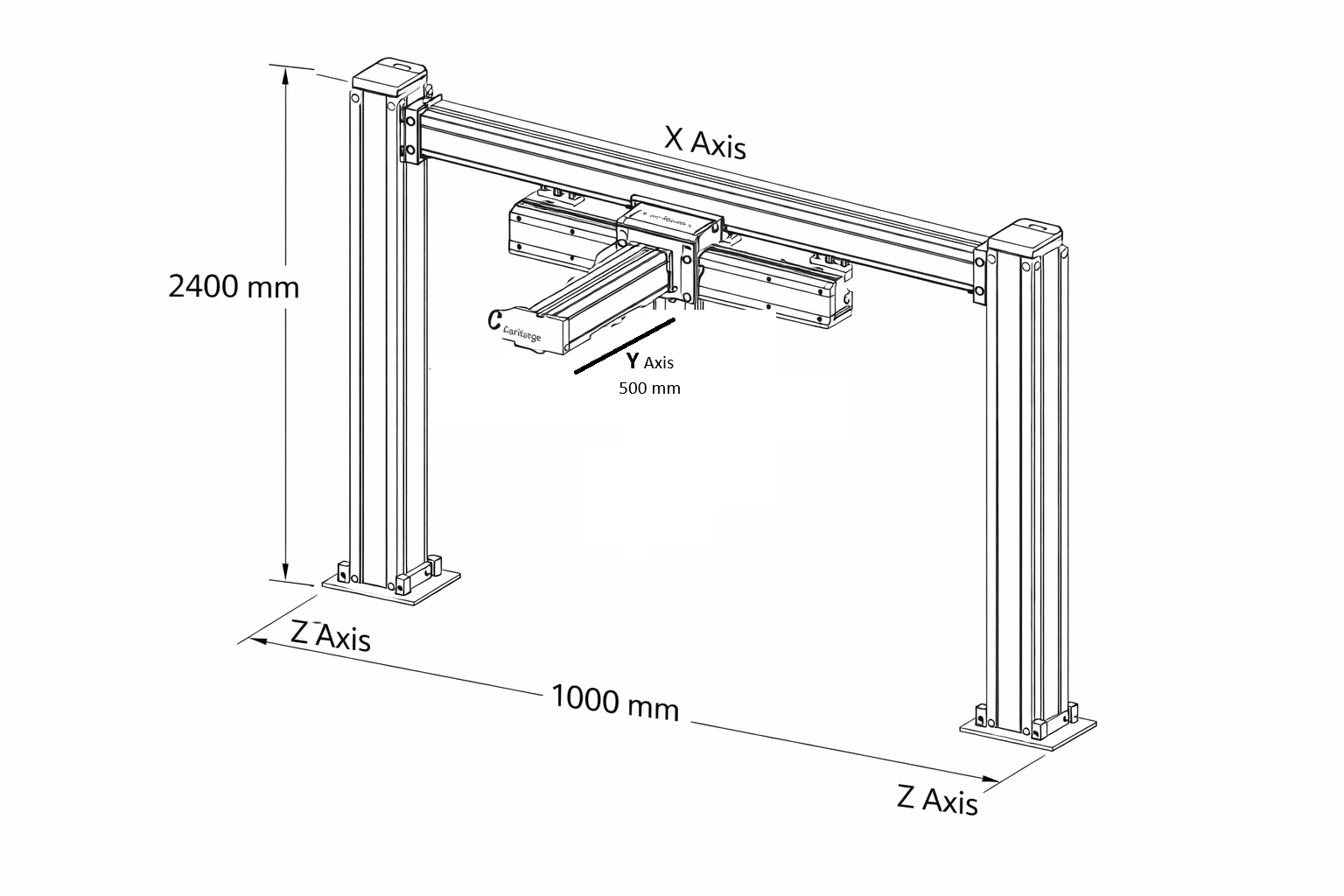
Technical Specifications
- ▸ Positioning accuracy: ±0.5–2 mm
- ▸ No reconfiguration required
- ▸ Compatibility with various equipment types
- ▸ Scalable architecture
Implementation Variants
- ✓ Cabinet-based system (X-Cabinet)
- ✓ Mobile system (X-Table)
- ✓ Ceiling-mounted system (X-Satellite)
Visual Materials
X-Dental Logo
Cabinet Robot XYZ

Cabinet Work

Robot System
Technology Vision
This development represents the transition from adaptive robotics to geometrically deterministic automation, in which the environment is standardized for the robot — ensuring predictability, reliability, and scalability.
Legal Note
This application is a provisional patent application establishing a priority date. To obtain full patent protection, a non-provisional application must be filed within the prescribed period.